I. 시작하는 말
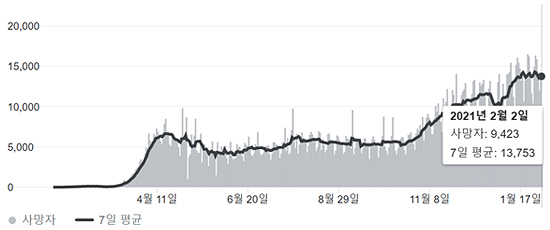
2019년 말 시작된 COVID-19 바이러스의 확산은 여전히 해결되지 않고 우리사회 뿐만 아니라 전 세계적인 심각한 문제로 남아 있다. 코로나 사태가 발생한지 1년여 지난 현재, 전 세계 감염자수 1억 명 이상, 하루 사망자 수가 평균 만 명을 넘어 전체 사망자가 250여만 명이라고 한다. 미국의 경우, 최근까지 사망자가 2차 대전 당시 전사자수와 베트남 전사자를 합친 50만 명에 육박 한다는 뉴스들을 통해 그 심각성을 더욱 실감할 수 있다. 백신과 치료제가 속속 개발되고 있지만 변이 바이러스로 인한 감염자는 여전히 급증하고 있으며, 1~2년이면 이 사태가 끝날 것이라는 전문가들의 사태종식시점은 점점 더 멀어지고 있는 것이 사실이다.
이러한 무차별적인 감염질환의 확산은 많은 사회적 변화를 불러오고 있으며, 과학기술 분야에도 기존 의료 바이오 기술뿐 아니라 소위 '미래기술'로 여겨지던 서비스 로봇, 원격 의료, 5G 통신, 인공지능, 또한 이들의 융합을 통한 비대면 기술의 발전을 가속화 시키고 있다. 이는 비대면 기술을 통해 사람들의 접촉을 최소화 하는 방안이 바로 감염병 확산을 막는 가장 좋은 방법으로 대두 되고 있기 때문일 것이다. 본 편에서는 현재 사회가 요구하는 비대면 관련 기술 중, 특히 비대면 의료 로봇의 개발 현황에 대해서 소개하고자 한다.
II. 비대면 원격 초음파 영상진단 로봇의 개발
국내에도 코로나 감염이 본격화 되면서 자연스럽게 비대면 기술에 대한 사회적 수요가 증대 되고 있다. 비대면 의료로봇은 진단을 시행하는 의료진과 대상 환자가 서로 만나지 않고 의료 행위가 가능해야 하므로 기본적으로 '원격 진단'을 바탕으로 한다. 흔히 기존 원격진단은 화상통신 시스템을 통해 음성이나 영상을 주고받는 '문진'을 떠올리지만, 마스터-슬레이브 구성을 가지는 원격 로봇을 원격진단에 적용하면 훨씬 다양한 의료서비스 제공이 가능하다. 여기서 마스터는 로봇을 조작하는 역할을 하고, 슬레이브는 마스터의 의도에 따라 움직이는 로봇 시스템을 말한다. 대표적인 장거리 원격 의료로봇의 예로써 원격 초음파 진단로봇을 들 수 있다. 초기의 원격 초음파 진단로봇은 (좀 거창하지만) 우주정거장에서 발생 가능한 환자 진단까지 목표로 한 유럽 우주국(Europe Space Agency)의 프로젝트로부터 시작되었다.

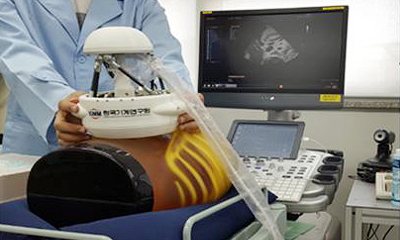
굳이 초음파 영상진단이 필요한가? 하는 생각이 들 수도 있지만 초음파 영상이야 말로 인체의 해부 단면을 가장 빠르고, 간편하고, 정확히 살펴 볼 수 있는 의료영상 모달리티이다. 단지, 초음파 진단을 위해서는 많은 훈련이 필요하므로 원격으로 전문가가 프로브를 직접 조작하는 방식이 필요하다. 이를 위해 원격로봇제어 기술이 적용 되어야 하며, 필자도 도서산간 오지군부대와 같은 의료취약지의 환자에게 적용하기 위한 원격 초음파 영상진단 로봇을 현재까지 개발해 오고 있다.
III. 비대면 원격 검체채취 로봇의 개발
코로나 초기에 대량으로 발생하는 감염자에 의해 의료진이 2차 감염되는 문제가 대두 되었다. 코로나와 같은 호흡기 감염병의 검체를 채취하기 위해서는 코나 입에 면봉을 집어넣는데, 이 과정에서 검사대상자의 비말 전파를 통해 의료진이 감염되는 것이다. 의료진 감염을 차단하기 위해서는 역시 접촉을 최소화 하는 비대면 기술이 필요한 상황이다. 이 과정에서 '드라이브 쓰루', '워킹쓰루' 와 같은 방법이 고안되어 현재도 활용 중인데, 방호복 착용으로 인해 여름에는 너무 덥고, 검사소가 실외에 있으므로 겨울에는 너무 춥다는 이유로 의료진은 여전히 어려움에 처해있다. 이러한 문제를 원천적으로 해결하기 위해서 비대면 의료로봇의 역할이 다시 필요해졌다.
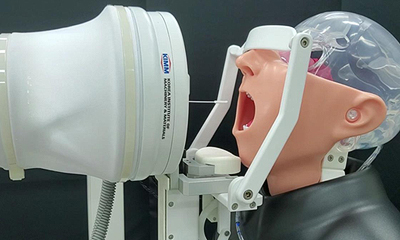
현재 개발된 비대면 검체채취 로봇은 형태는 다르지만 앞서 설명한 원격 초음파 영상진단로봇의 원격 제어 플랫폼을 그대로 이용하였다. 검사의료진은 감염의 위험이 없는 안전한 장소에서 일반적인 복장으로 마스터 장치를 조작하여 검체채취를 할 수 있게 하였다. 화상통신 기능이 구현되어 검사의료진이 검체채취 전에 환자와 문진을 할 수 있고, 검사 대상자의 확대된 얼굴을 보며 실시간으로 슬레이브 로봇을 조작하고 면봉을 삽입할 수 있게 하였다. 검사대상자의 얼굴 형상에 따라서 검사 영역인 코나 입의 위치가 다를 수 있는데, 로봇이 면봉을 상하 좌우 움직여 위치를 자유롭게 설정할 수 있도록 하는 병렬로봇 기구구조를 제안하였다. 또한 로봇을 최대로 움직여도 얼굴 영역을 벗어나지 않고 유연한 면봉만이 사람얼굴에 삽입되도록 안전하게 설계하였다. 또한 면봉이 검사 영역까지 도달 했을 때 느껴지는 저항감을 원격조작자가 알 수 있도록 원격 힘 센싱 기술을 구현 한 것이 특징이다. 개발된 시스템은 다른 연구 그룹들이 흔히 사용하는 산업용 로봇 팔을 이용하는 시스템에 비해 훨씬 안전하고 비교적 저렴하게 구현 가능하다는 장점이 있다. 최근에는 현장 의료진의 역할을 최소화하기 위해 검체 면봉이나 검사통을 검사대상자가 직접 쉽게 장착하고 탈거, 자동 소독 할 수 있도록 하는 아이디어를 구현중이다. 또한 원격에서 의료진이 로봇을 조작하는데 어려움을 최소화하기 위해서 사람 얼굴 특징 형상과 면봉형상을 학습하여, 이를 바탕으로 자동 검체채취가 가능한 시스템으로 발전시키는 연구를 진행 중이다.

IV. 맺음말
비대면 의료로봇 기술의 핵심은 의료진과 환자가 같은 공간에 있지 않도록 하는 기술이다. 이를 통해 전염의 위험성이 큰 상황에서 의료진의 안전을 보장하기 위한 기술이다. 코로나라는 전대미문의 사건을 겪으며 비대면 의료로봇 기술은 경제성장과 방역을 동시에 달성하기 위한 필수 기술로 각광을 받으며 병원을 포함한 일상생활에도 필요한 기술로 재조명 되고 있다. 그만큼 지금껏 소위 '미래기술'로 여겨지던 기술들이 코로나 사태로 인하여 지금 당장 필요한 기술로 인식되며 이에 대한 사회적인 요구가 커지고 있다고 할 수 있다. 이러한 분위기에 필자가 개발하고 있는 여러 비대면 로봇 기술들이 하루빨리 상용화 되어 많은 사람들에게 도움이 되고 또한 사회문제를 해결할 수 있는 솔루션이 되길 바란다.